
DER Integration Is A Control Problem, Part 2
Control system structure, metastructure, and the Tri-Polar Spectrum.

I wrote a recent post about the fact that DER integration is a distributed control problem, not an IT problem. Before we look into the details of DER/CER1 control, it will be useful to understand some control engineering and system architecture preliminaries. If you have not done so, it might be good to look at my postings on bulk power system control here and here.
Grid Related Control Taxonomy
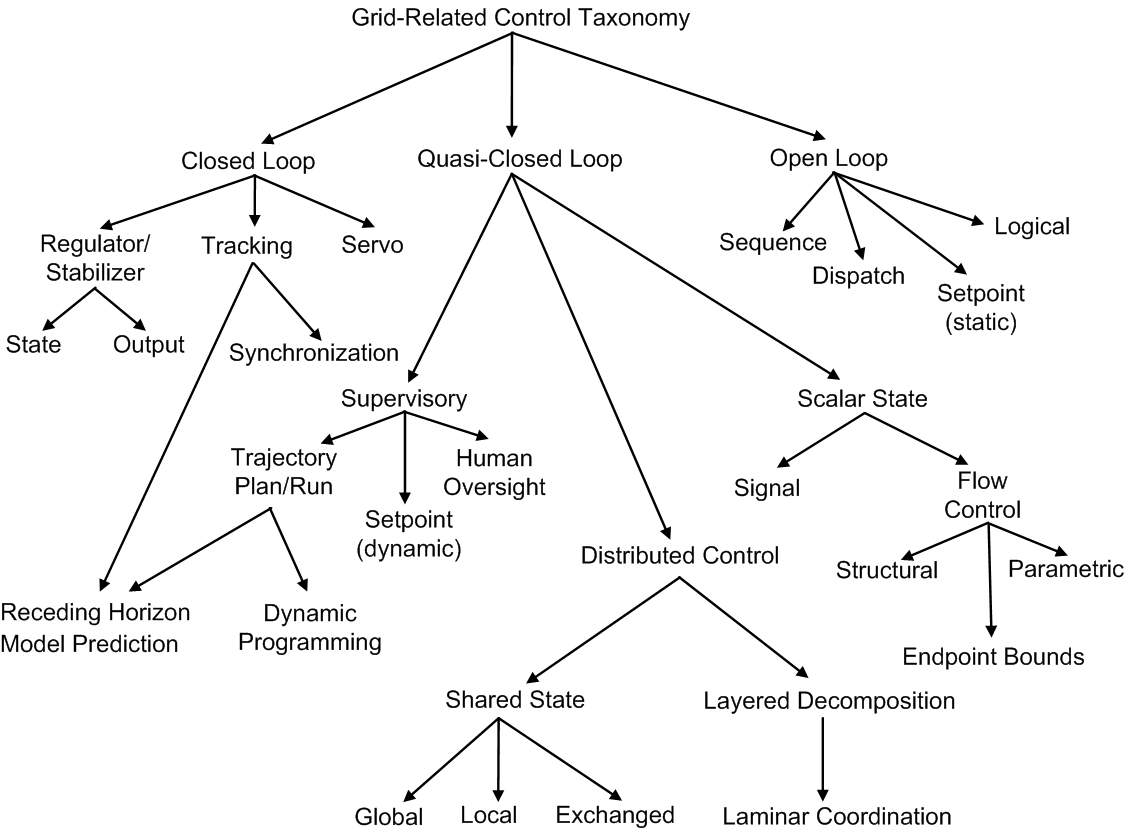
Control engineering is a large discipline, both very broad and very deep, and the literature on control theory and practice is enormous and quite mathematical. It is not practical to characterize all of it here, so in Figure 1, I have assembled an abbreviated taxonomy of control approaches in electric power systems. It focuses more on control structure, less on control laws or algorithms.
Note that wholesale electricity markets are included in this view of grid control, particularly in Receding Horizon Model Predictive (RHMP) control. We generally use the term market-control to indicate the close relationship between the two, but here we will just refer to control. Markets are in there.
Grid Control Problems
In the Grid Architecture work, we look at whole system problems, so Figure 2 provides a sample list of power grid control problems, including control of Behind-The-Meter (BTM) resources:
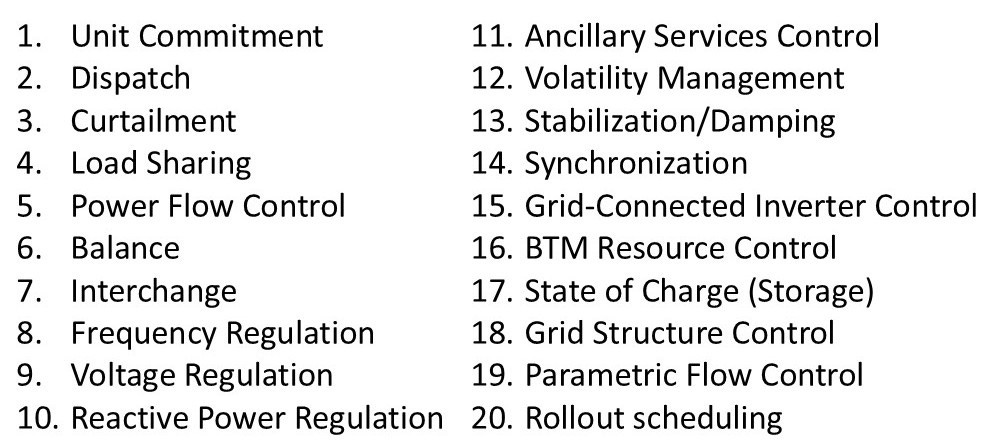
I revised this list somewhat from the one in the Better Balance posting to highlight external (grid) control of inverter-based resources, variable structure and parametric flow controls, volatility management (reliability reserve control, generation ramping for solar and wind compensation, etc.), and storage state of charge control (storage power flow is included in general power flow control),2 since these are important emerging trends.
Previous to the emerging large scale penetration of distribution edge connected resources, the problems shown above mapped to one or more of the elements of the control taxonomy. Some of the control solutions use combinations of more than one control approach. The Exchanged Shared State and Layered Decomposition elements are not yet widely used but are there because we will be looking at them in the context of DER/CER integration later.
A few mapping examples:
Tertiary generator control - model predictive receding horizon tracking control
Generator load sharing - distributed global state control
Rooftop solar injection curtailment via DOEs3 - scalar state flow control endpoint bounds
Secondary generator control (ACE) - close loop servo-regulator control
Thermostat setbacks for DER/CER programs - supervisory dynamic setpoints
Static VAr compensation - stabilization
Interface control for inverter-based resources - synchronization
It is common for controls to be nested, composed, or arranged in hierarchies or other metastructures.4 For example, generator secondary control is a servo regulator loop nested inside multiple tertiary and supervisory RHMP tracking controls. Consequently, an overall control architecture can become quite complex and inappropriate metastructure can lead to hidden coupling issues.
A Few Words About Systems
Another aspect of control architecture applies to systems in general and to controls specifically. It also brings up something I find Barney-the-Dinosaur-level annoying. I can’t tell you how many times I have seen or heard the following: “Centralized and distributed systems are polar opposites.” Sometimes it is phrased as “Centralized and decentralized systems are at the polar opposite ends of a spectrum.”
People, people, no. Just no.

Actually, it takes a tri-polar diagram to show the relationships among centralized, decentralized, and distributed systems, keeping the following definitions in mind:
Centralized System – data and signals flow to a central hub where all logic and control are determined; data and commands flow back to individual elements.
Decentralized System – multiple separate entities operate independently with, at most, some small amount of supervision.
Distributed System – decentralized system where the parts cooperate to solve a common problem. This implies some form of peer-to-peer interaction.
Read a deeper discussion about this in my posting here. Figure 3 shows the key diagram that indicates how to think about these concepts. The spectral axes are autonomy, coordination, and dispersal.
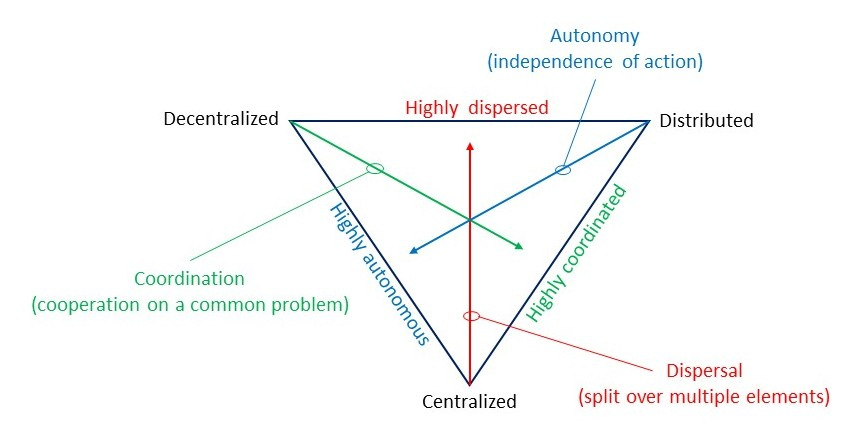
Systems can fit anywhere inside or on the triangle. Most systems do not end up being “pure” and so are not quite at the corners. Some systems have a portion that is essentially distributed and a portion that is centralized, so it can be necessary to decompose a system to fully understand its relationship to this chart (organized wholesale electricity markets are mostly distributed but have a centralized clearing mechanism, for example). To fully understand control system structure, it is necessary to understand the control metastructure.
What Does This Mean for DER/CER Integration?
We must specify a metastructure for DER/CER control and then specify the control structures within that metastructure to set the control architecture in the context of the whole system architecture. At that point, the designers can specify the control algorithms and implementations. But before we can do that, we must have an understanding of structural, electrical, behavioral, and even financial issues related to distribution-connected resources and loads. We will examine these issues next.
Distributed Energy Resources/Consumer Energy Resources.
Unit commitment and (day ahead schedules for) dispatch are included because optimal constrained scheduling is a control problem (see, for example, the literature on optimal on-off scheduling of heat pumps).
Dynamic Operating Envelopes
A structure of structures.
While there’s exceptional insights and detail imho it’s still written from the perspective of “supply side only control”.
The detail in Figure 2 while accurate from an engineering perspective misses imho the confounding, and actual “polar opposites” of *purpose* across the “meter” BTM/FTM divide.
In FTM the purpose is “governed” by the businesses with revenue and profit as the exclusive motive … it wants/needs to be “paid”.
In BTM the purpose is individual, for amenity, value, and, as a mindset, crucially and fundamentally … to save.
While BTM is individual… collectively it’s “community; past “supply side only” control systems worked because the system let/expected individuals to behave naturally … so we had forecastable load profiles to respond to.
But now energy businesses see the opportunity in controlling CER/DER via their “herding” behaviour!
The real problem will be different “shepherds” not looking after their sheep but their own interests … and worse … competing with each other for different objectives (other than their united “greed” to make the most revenue and profit).
If we think then of the challenge where the “polar bear” as the system … and different shepherds poking and prodding it … someone is going to get badly hurt !