


Centralized and Distributed are Not Polar Opposites
Here is how to think about this aspect of system architecture

Time and again I have seen diagrams and writings related to the electric power grid saying that that centralized systems are the polar opposite of decentralized/distributed systems. Furthermore, decentralized and distributed systems are often confused with each other and the terms are treated as if they are interchangeable. The issue comes up frequently in the discussion of energy resources connected at the electric distribution level. This “polar opposite” or “two ends of a spectrum” view is flawed and its widespread usage precludes better thinking about practical system architecture options.
First a few definitions:
A centralized system is one in which all flows (data, energy, commands) follow a hub-and-spoke or star structure. Decision and control originate in the hub.
A decentralized system in one in which multiple separate parts operate independently with at most very limited supervision
OK, so far it looks like this lines up with an “opposites ends of a continuum” centralized vs. decentralized concept. But now let’s look at what we mean by a distributed system.
A distributed system is a decentralized system in which the parts cooperate to solve a common problem. It is the cooperation on a common problem that distinguishes a distributed system from a decentralized one. Cooperation may be achieved in a number of ways (see Coordination later in this posting).
To fully understand the centralized/decentralized/distributed concepts, we use the triangle diagram in Figure 1 below.
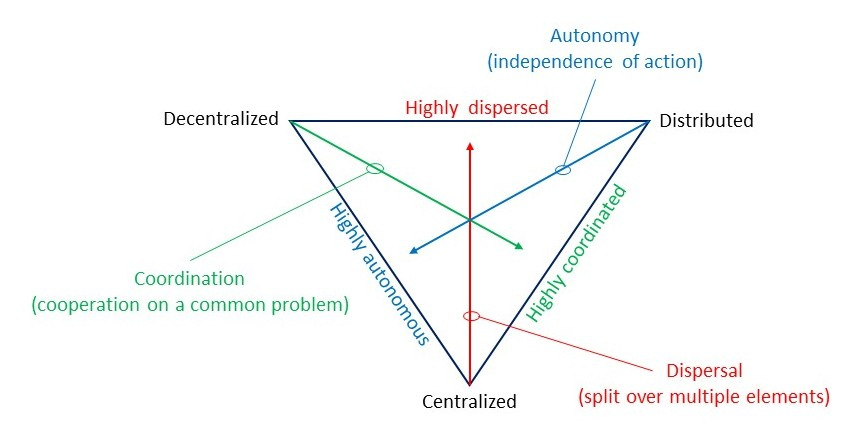
In this figure we can see a planar continuum (not just a single line but a two dimensional space enclosed by the triangle) in which we have the three extremes for system structure at the corners, and three key properties that characterize systems. The three properties are:
Dispersal - this can be either logical or physical separation. Most of the time when we think about dispersal, we mean that there are physical units that are separated physically in some fashion, like rooftop solar panel installations on separate houses. The spectrum for this ranges from concentrated to dispersed.
Autonomy - degree to which element operation is independent of other system elements. Autonomy is not just a matter of not exchanging or sharing signals or data. Consider a worker in a factor who is making widgets: if the worker has all the tools and materials to make a widget, then the worker can proceed to make them alone (that is, autonomously). If, however, the widget requires a sub-assembly made by another worker, then the widget maker’s work is contingent upon on the other worker and so is not fully autonomous. The spectrum for this runs from dependent to autonomous.
Coordination - degree to which parts cooperate to solve a common problem. Coordination is discussed in more detail below. The spectrum for this runs from decoupled to coordinated.
So for example, centralized and distributed systems are both highly coordinated but at opposite ends of a concentrated ↔ dispersed spectrum. Decentralized and distributed systems are both dispersed, but they are at the ends of an autonomous ↔ dependent spectrum. We could make six single line spectrum diagrams (three system pairs times two property axes) by taking each pair of system structures and plotting them on spectra that use the two properties that are not common to the two system types (see Figure 2 below).
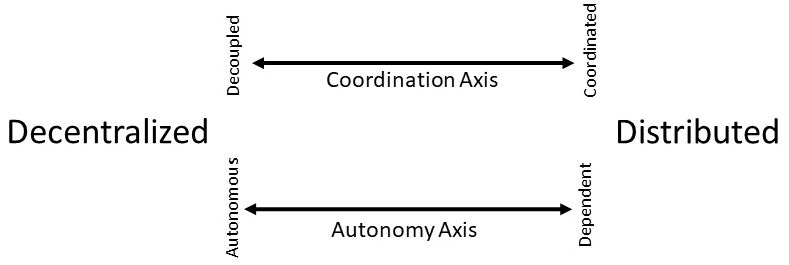
I find the triangle diagram more useful than the sets of linear spectra, though, because any real system is likely to exist somewhere inside the triangle, as opposed to at one of the corners. Having the triangle diagram helps in thinking about proposed system designs and eliminates the kind of false alternative choices that I mentioned above. Drawing this diagram as a triangle works better than trying to draw an isometric diagram with three orthogonal axes for the three properties because in the triangle diagram the three structure extremes are easily visualized.
Note: the presence of a control center in a system does not automatically mean the system is centralized (this is a fallacy I have seen multiple times in presentations and literature). The control center may act as one of the elements of a distributed system, and so its presence does not automatically make the system centralized. It depends on how the system elements interact.
Coordination
Cooperation to solve a common problem is the defining characteristic of a distributed system, but how does cooperation happen? Coordination requires at least one of the following: communication, or access to a common (shared) set of data. Coordination may originate at a control center and be communicated to the system elements or it may be distributed among the elements of the system. It may be layered, meshed, or some other form - coordination has a structure of its own and in the power system context it is quite important to understand this structure and in fact specify it when developing a new power system architecture for integration of distribution-connected resources.
An example of coordination via shared data is how spinning generators on the bulk power system adjust (via droop control) to allocate the load appropriately among the generators. The common data is system frequency, which each generator senses without any communication from a control center or other generators. A truly amazing approach.
So how about real time wholesale electricity markets? Centralized or distributed? The market as a whole is distributed: generator operators and load serving entities cooperating (via competition!) to provide users with electricity (the common problem). The coordination mechanism (the market optimization, clearing, and dispatch software) however, is centralized. So in the electricity market we have a distributed system with an embedded centralized coordination structure.
In control theory, coordination is a subtopic of distributed control and is achieved through two primary approaches:
Goal modification - basically incrementally moving the goalposts to get the system to behave in a particular manner. Moving the goalposts can be done by altering objective functions or making state adjustments. We did not find these methods useful for power grid applications.
Structural methods - layered decomposition of optimization problems yields a data and signal exchange structure through which system elements communicate in order to coordinate. We have used the layered decomposition approach to develop simple but strong practical structure rules for power grid architectures involving distribution-connected resources.
Note that in the grid architecture work, we invert the control/coordination relationship so that control is a subset of coordination. This helps greatly in sorting out both structures in a power grid context because some aspects of coordination actually supervise traditional controls.
In the case of a power system with distribution-connected resources, many of which may reside behind customer meters, coordination is the systematic operational alignment of utility and non-utility assets to provide electricity delivery. This might be done by direct dispatch from a central control point, but that would entail severe observability, scalability, and reliability/resilience issues.
An example of what I will call here a “light touch” coordination is where a control center sends simple limits and/or setpoints to system elements such rooftop solar inverters, responsive loads, or energy storage elements, requiring only low bandwidth and relatively infrequent communications. The units then operate in mostly autonomous mode. This approach is important in the power system context because of the limitations of communications involving distributed resources, especially those behind the customer meter. Coordination of rooftop solar inverters for injection of power into the distribution feeders is a prime example. If, in addition, the inverters sense feeder voltage locally and act independently to assist voltage regulation, then we can see a hybrid of “light touch” coordination with fully autonomous operation (effectively a hybrid system structure), which is why the triangle diagram encloses a space inside which a system design might fall, as opposed to being at one of the corners.
This choice of system structure is a basic aspect of system architecture and therefore grid/power system architecture. Understanding the location of the system inside the System Structure Triangle (for both the existing system and the proposed future system) is fundamental to developing a successful modernized electric power system.
So, know these structures well and understand that you have multiple structure classes in the grid to which these apply.